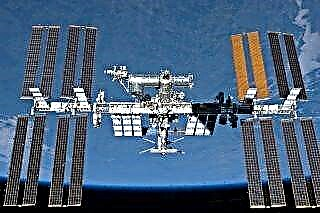
Un equipo combinado de ingenieros estadounidenses y canadienses ha dado un gran primer paso adelante al aplicar con éxito una nueva investigación robótica, primera en su tipo, realizada a bordo de la Estación Espacial Internacional (ISS) para la eventual reparación y reabastecimiento de combustible de satélites espaciales en órbita de alto valor. , y que tiene el potencial de algún día generar miles de millones de dólares en ahorros de costos para el sector espacial gubernamental y comercial.
Investigadores alegres de ambas naciones gritaron "¡Sí!" - Después de utilizar con éxito el experimento de la Misión de Reabastecimiento de Energía Robótica (RRM), atornillado fuera de la EEI, como un banco de pruebas de tecnología para demostrar que un robot controlado a distancia en el vacío del espacio podría realizar tareas de trabajo delicadas que requieren un control de movimiento extremadamente preciso. El revolucionario experimento de robótica podría extender la vida operativa utilizable de los satélites que ya se encuentran en la órbita de la Tierra y que nunca fueron diseñados para trabajar.
"Después de dedicar muchos meses de tiempo profesional y personal a RRM, fue una gran emoción y un gran alivio para mí ver la primera transmisión de video de una herramienta de RRM", dijo Justin Cassidy en una entrevista exclusiva en profundidad con Space Magazine. Cassidy es gerente de hardware de RRM en el Centro de vuelos espaciales Goddard de la NASA en Greenbelt, Maryland.

Y el equipo de RRM ya tiene planes para llevar a cabo un seguimiento aún más ambicioso en los experimentos que comenzarán tan pronto como este verano, incluida la muy esperada transferencia de fluidos para simular un reabastecimiento satelital real que podría transfigurar aplicaciones de robótica en el espacio. ¡Vea los detalles a continuación!
Todas las operaciones robóticas en la estación fueron controladas de forma remota por los controladores de vuelo desde tierra. El propósito del control remoto y la robótica es liberar a la tripulación humana de la EEI para que puedan trabajar en otras actividades importantes y realizar experimentos científicos que requieran el pensamiento y la intervención humanos en el sitio.

Durante un período de tres días del 7 al 9 de marzo, los ingenieros realizaron operaciones conjuntas entre el experimento de la Misión Robótica de Reabastecimiento de Combustible (RRM) de la NASA y el "operario" robótico de la Agencia Espacial Canadiense (CSA): el robot Dextre. Dextre se llama oficialmente el SPDM o manipulador diestro de propósito especial.
El primer día, los operadores robóticos en la Tierra maniobraron de forma remota el "manitas" de Dextre de 12 pies (3,7 metros) de largo para el experimento RRM utilizando el brazo robótico construido en Canadá (SSRMS) de la estación espacial.
La "mano" de Dextre, técnicamente conocida como "OTCM", luego agarró e inspeccionó tres herramientas de trabajo satelitales especializadas diferentes alojadas dentro de la unidad RRM. Las exhaustivas evaluaciones mecánicas y eléctricas de la herramienta Safety Cap Tool, la herramienta de manipulación de manta y cortador de alambre y la herramienta multifunción descubrieron que las tres herramientas funcionaban perfectamente.

"Nuestros equipos engancharon mecánicamente la" mano "del robot canadiense" Dextre "en la herramienta RRM Safety Cap Tool (SCT). El RRM SCT es la primera unidad en órbita en usar la capacidad de video de la mano Dextre OTCM ”, explicó Cassidy.
“Al comienzo de las operaciones de la herramienta, los controladores de misión impulsaron mecánicamente el umbilical eléctrico del OTCM hacia adelante para acoplarlo con la caja electrónica integral del SCT. Cuando se aplicó la alimentación a esa interfaz, nuestro equipo pudo ver eso en los televisores de pantalla grande de Goddard: el video de "primera luz" de la SCT mostró una toma de la herramienta dentro del compartimento de almacenamiento RRM (ver foto).

"Nuestro equipo estalló en un grito de" ¡Sí! " para felicitar esta exitosa verificación del sistema funcional eléctrico ".
Luego, Dextre llevó a cabo una variedad de tareas destinadas a probar qué tan bien podría manipularse una variedad de accesorios de gas, válvulas, cables y sellos representativos ubicados en el exterior del módulo RRM. Lanzó bloqueos de lanzamiento de seguridad y cortó meticulosamente dos cables de bloqueo de satélite extremadamente delgados, hechos de acero, y midió solo 20 milésimas de pulgada (0,5 milímetros) de diámetro.
“El evento de corte de cables tuvo una duración de solo minutos. Pero ambas tareas de corte de cables tomaron aproximadamente 6 horas de operaciones robóticas coordinadas y seguras. El cable de la cerradura había sido encaminado, retorcido y atado en el suelo en la interfaz de la tapa ambiental y la válvula en T antes del vuelo ”, dijo Cassidy.
Este ejercicio RRM representa la primera vez que el robot Dextre se utilizó para un proyecto de investigación y desarrollo de tecnología en la EEI, una gran expansión de sus capacidades más allá de las de mantenimiento robótico del puesto avanzado de órbita masiva.
Leyenda del video: Misión robótica de reabastecimiento de combustible de Dextre: Día 2. El segundo día de la misión más exigente de Dextre concluyó con éxito el 8 de marzo de 2012 cuando el técnico robótico completó sus tres tareas asignadas. Crédito: NASA / CSA

En total, los tres días de operaciones tomaron alrededor de 43 horas, y avanzaron un poco más rápido de lo esperado porque eran lo más cercanos a lo nominal como se podía esperar.
"Los días 1 y 2 duraron aproximadamente 18 horas", dijo Charles Bacon, ingeniero jefe de sistemas / operaciones de RRM en NASA Goddard, a la revista Space. “El día 3 duró aproximadamente 7 horas desde que terminamos todas las tareas temprano. Los tres días se basaron en 18 horas, con el equipo trabajando en dos turnos. Así que el tiempo fue el esperado, y en realidad un poco mejor ya que terminamos temprano el último día ".

"Durante los últimos meses, nuestro equipo ha estado preparando el escenario para demostraciones en órbita RRM", me dijo Cassidy. "Al igual que una producción teatral, tenemos muchos ingenieros detrás de escena que han brindado soporte de desarrollo y continúan siendo parte de las operaciones RRM en órbita".
“En cada etapa de RRM, desde la preparación, la entrega, la instalación y ahora las operaciones, me sorprenden los inmensos esfuerzos que muchos equipos diversos han contribuido para que RRM suceda. La Oficina de Capacidades de Servicio Satelital en el Centro de Vuelo Espacial Goddard de la NASA se asoció con el Centro Espacial Johnson, el Centro Espacial Kennedy (KSC), el Centro Marshall de Vuelo Espacial y el centro de control de la Agencia Espacial Canadiense en St. Hubert, Quebec para hacer realidad RRM ".
"El éxito de las operaciones RRM hasta la fecha en la Estación Espacial Internacional (ISS) que usa Dextre es un testimonio de la excelencia de las numerosas organizaciones y socios de la NASA", explicó Cassidy.
La "tarea de extracción de accesorios de gas" de tres días fue una simulación inicial para practicar técnicas esenciales para reparar de forma robótica los satélites que funcionan mal y reabastecer de combustible los satélites que, de otro modo, funcionarían nominalmente, se extenderían para ampliar su vida útil durante varios años.
Los técnicos en tierra usan los accesorios y las válvulas para cargar todos los fluidos, gases y combustibles esenciales en los tanques de almacenamiento de satélites antes del lanzamiento y que luego se sellan, cubren y normalmente nunca se accede nuevamente.
"El impacto de la estación espacial como un banco de pruebas de tecnología útil no puede ser exagerado", dice Frank Cepollina, director asociado de la Oficina de Capacidades de Servicio Satelital (SSCO) en el Centro de Vuelo Espacial Goddard de la NASA en Greenbelt, Maryland.
“Se demostrarán nuevas tecnologías de servicio satelital en un entorno espacial real en meses en lugar de años. Esto es enorme Representa un progreso real en el avance de la tecnología espacial ".
Otros cuatro próximos experimentos RRM que se realizarán tentativamente para este año demostrarán la capacidad de un robot de control remoto para eliminar barreras y repostar tanques de gas satelitales vacíos en el espacio, ahorrando así un hardware costoso para unirse prematuramente al depósito de chatarra orbital.
El momento de las futuras operaciones de RRM puede ser desafiante y depende de la disponibilidad de Dextre y el brazo SSRMS, que también están fuertemente reservados para muchas otras operaciones de ISS en curso, como caminatas espaciales, actividades de mantenimiento y experimentos científicos, así como el atraque y / o descarga constante flujo de buques de reabastecimiento de carga crítica como Progress, ATV, HTV, Dragon y Cygnus.
La flexibilidad es clave para todas las operaciones de ISS. Y aunque el equipo de la estación no está involucrado con RRM, sus actividades podrían estarlo.
"Si bien la tripulación en sí misma no depende de Dextre para sus operaciones, las operaciones de Dextre pueden afectar indirectamente lo que la tripulación puede o no hacer", me dijo Bacon. "Por ejemplo, durante nuestras operaciones RRM, la tripulación no puede realizar ciertas actividades de ejercicio físico debido a cómo ese movimiento podría afectar el movimiento de Dextre".
Aquí hay una lista de las próximas operaciones de RRM - restricciones de programación de ISS pendientes:
* Reabastecimiento de combustible (verano de 2012): después de que Dextre abra una válvula de combustible que es similar a las que se usan comúnmente en los satélites en la actualidad, transferirá etanol líquido a través de una manguera de combustible robótica sofisticada.
* Manipulación de la manta térmica (TBD 2012) - Dextre practicará cortar la cinta de la manta térmica y plegar una manta térmica para revelar el contenido debajo.
* Extracción de tornillos (sujetadores) (TBD 2012) - Dextre desenroscará robóticamente los pernos satelitales (sujetadores).
* Extracción de la tapa eléctrica (TBD 2012): Dextre eliminará las tapas que normalmente cubrirían el receptáculo eléctrico de un satélite.
RRM fue llevado a orbitar dentro de la bahía de carga del transbordador espacial Atlantis durante julio de 2011 en la misión de transbordador final (STS-135) del programa de transbordadores de tres décadas de duración de la NASA y luego montado en una plataforma de trabajo externa en la armadura de la columna vertebral de la ISS por astronautas que caminan en el espacio. El proyecto es un esfuerzo conjunto entre la NASA y CSA.
“De esto se trata el éxito. Con RRM, realmente estamos allanando el camino para futuras exploraciones robóticas y servicios satelitales ”, concluyó Cassidy.

…….
24 de marzo (sábado): Conferencia gratuita de Ken Kremer en la Asociación Astronómica de Nueva Jersey, Voorhees State Park, NJ a las 830 PM. Tema: Atlantis, el programa Shuttle de End of Americas, RRM, Orion, SpaceX, CST-100 y el futuro del vuelo espacial humano y robótico de la NASA